CAN(Controller Area Network)是一种用于汽车和工业自动化的串行通信协议。
在当前的汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。为适应“减少线束的数量”、“通过多个LAN,进行大量数据的高速通信”的要求。德国Bosch公司在1980年代末开发出CAN。
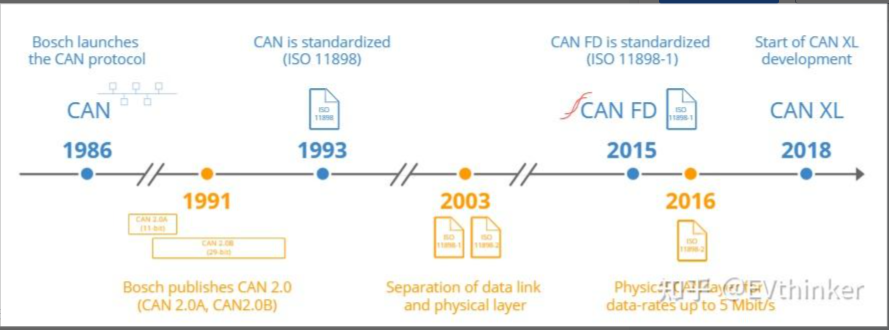
CAN 总线历史发展如下:
· CAN前:汽车ECU依赖于复杂的点对点布线。
· 1986 年:德国Bosch开发了CAN协议即解决方案。
· 1991 年:德国Bosch发布CAN 2.0 (CAN 2.0A: 11 bit, 2.0B: 29 bit)。
· 1993 年:CAN被采用为国际标准 (ISO 11898)。
· 2003 年:ISO 11898成为标准系列。
· 2012 年:德国Bosch发布CAN FD 1.0(灵活的数据传输)。
· 2015 年:CAN FD协议是标准化的(ISO 11898-1)。
· 2016 年:物理CAN 层,数据速率高达5 Mbit/s,在 ISO11898-2 中标准化。
· 2018 年: CiA 开始开发CAN XL。
· 2024 年:CAN XL 标准化 (ISO 11898-1:2024, 11898-2:2024)。
今天,CAN已成为汽车、轮船、 飞机, EV 电池、机械的主要通讯方式等。
CAN总线的特点
实时性:CAN总线具有优越的实时性能,适用于需要及时传输数据的应用,如汽车控制系统和工业自动化。
多主机系统:CAN支持多主机系统,多个节点可以同时发送和接收数据。
差分信号传输:CAN使用差分信号传输,通过两个线路(CAN_H和CAN_L)之间的电压差来传递信息。
仲裁机制:CAN总线采用非破坏性仲裁机制,通过比较消息标识符的优先级来决定哪个节点有权继续发送数据。
广播通信:CAN总线采用广播通信方式,发送的数据帧可以被总线上的所有节点接收。
低成本:CAN总线的硬件成本相对较低,适用于大规模的系统集成。
灵活性:CAN协议灵活适应不同的应用场景,支持不同的波特率和通信速率。
错误检测和处理:CAN总线具有强大的错误检测和处理机制,通过CRC检查和其他错误检测手段,提高了通信的可靠性